
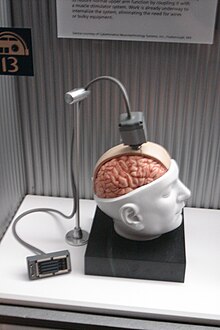
뇌-컴퓨터 인터페이스(영어: brain–computer interface, BCI)는 뇌와 외부 장치간의 직접적인 상호작용 방식을 의미한다. 양방향 정보 전달을 가능케 한다는 점에서 신경제어기술neuromodulation과 차이가 있다. 인간의 인지능력이나 감각-운동기능을 탐구하고, 뇌의 각 부위에 대한 기능을 지도로 만들며, 보조, 증진, 치유하는데에도 관련이 있다.
BCI는 1970년대에 미국 국립과학재단의 승인을 받아 UCLA에서 처음 시작되었는데, 곧 DARPA도 연구를 지원하기 시작한다. 이 연구 이후에 출판된 논문들에서 뇌-컴퓨터 인터페이스라는 표현이 처음으로 사용된다. 처음에는 신경보철물에 응용되어 시청각 장애나 운동장애를 회복시키는데 초점을 두었다. 두뇌피질의 신경가소성 덕분에 의지에 한번 적응하기만 하면, 마치 원래 가지고 있었던 감각기관이나 운동기관인 것처럼 뇌에서 신호를 처리할 수 있다. 동물을 대상으로 한 임상시험을 수년간 실시하여 1990년 중반에는 신경보철물이 사람에게 직접 적용되는 사례가 나타나기도 하였다.
신경제어 인터페이스(NCI), 정신-기계 인터페이스(MMI), 직접 신경 인터페이스(DNI), 뇌-기계 인터페이스(BMI) 등 다양한 이름이 있다. 미겔 니코렐리스 교수는 침습적인 경우 BMI라 하고 비침습적인 경우 BCI라 한다고 했는데, 현재 학계에서는 침습적인 경우 iBCI(intracortical-)라고 하는 추세이다.
역사
한스 베르거가 뇌의 전기적 활동을 발견하며 뇌전도(EEG)를 개발함으로써 BCI가 시작되었다. 1924년에 베르거는 뇌전도를 사용해 두뇌 활동을 최초로 기록하였고, 이를 분석하여 베르거파나 알파파(8–13 Hz)와 같은 진동 신호를 식별하였다.
베르거가 처음으로 사용한 기록장치는 환자의 두피 밑에 은 도선을 삽입한 굉장히 초보적인 단계에 불과했다. 이는 후에 고무밴드로 은박을 머리에 고정한 형태로 대체되었다. 베르거는 이 센서들을 리프만 전기계에 연결하였지만, 실망스러운 결과밖에 얻지 못했다. 그러나 0.00001V까지 나타낼 수 있는 지멘스사의 이중고리 검류계와 같이 더욱 정교한 측정장치들을 사용함으로써 성공적인 결과를 얻게 되었다.
베르거는 뇌 질환과 뇌파의 상관관계를 분석하였다. 뇌전도는 뇌의 활동에 대한 완전히 새로운 연구 방법을 가능케 함으로써 뇌 연구를 위한 완전히 새로운 가능성을 열었다.
BCI라는 단어가 아직 등장하지는 않았지만, 뇌-기계 인터페이스의 가장 빠른 예시중 하나는 1965년에 미국의 작곡가인 앨빈 루시어의 《독주자를 위한 음악》에서 등장한다. 연주자는 알파파를 만들어내고, 뇌전도를 필터, 증폭기, 오디오 믹서와 같은 아날로그 신호처리기계를 통과시킴으로써 다양한 타악기를 연주한다.
BCI라는 용어를 처음으로 제안한 사람은 UCLA의 교수인 자크 바이달Jacques Vidal이다. 바이달은 BCI 분야에서 수많은 피어 리뷰 논문을 작성했고, BCI 커뮤니티에서도 이를 반영하여 바이달을 BCI의 창시자로 인정하고 있다. 그는 BCI를 1973년 논문에서 "뇌파를 통해 사물을 조종하는 것"으로 정의하였는데, 특히 불확정 음전위 편차 전위Contingent Negative Variation; CNV를 사용하였다. 이어서 1977년에는 시각 유발 전위Visual Evoked Potentials; VEP를 사용해 컴퓨터 화면의 커서를 움직여 미로를 탈출하는 실험을 함으로써 BCI를 처음으로 응용하였다. 그러나 그 이후 바이달은 2011년 오스트리아의 그라츠에서 Future BNCI 프로젝트의 후원을 받아 최초의 BCI에 대해 발표한 것 외에는 이 분야에서 다른 활동을 하지 않았다.
1988년에는 뇌전도를 통해 로봇에게 시작-정지-재시작 명령을 내려 바닥에 그어진 선을 따라 움직이도록 하는 연구가 이루어졌다.
1990년에는 행동보다 먼저 나타나는 활성전위인 CNV를 사용해 맞춤형 양방향성 BCI를 제작하여 버저를 조절하는 실험이 보고되었다. CNV로 얻어진 예측 정보들을 Electroexpectogram(EXG)이라 한다.
신경보철학과의 비교
신경보철학은 인공물을 통해 손상된 신경계나 뇌와 관련된 문제들, 또는 감각기관을 대체하고자 하는 신경과학의 한 분야를 말한다. 2010년 12월 기준 22만명의 사람이 사용하고 있는 인공와우가 가장 대표적인 신경보철물이라고 할 수 있다. 이 외에도 인공망막이 개발중이다.
신경보철학은 주로 신경계와 장치를 연결하는 것을 의미하는 반면, BCI는 신경계(주로 뇌)와 컴퓨터 시스템을 연결하는 것을 의미한다. 현재 응용중인 신경보철물들은 말초신경계통에도 연결되는 반면, BCI라는 단어는 주로 중추신경계통과 연관되어 있다는 차이도 있다. 그러나 이 용어들은 서로 바뀌어 사용되기도 한다. 신경보철학과 BCI는 둘 다 시·청각, 운동기능과 소통기능, 심지어는 인지능력까지 복구하는데 목적을 두고 있기 때문이다. 또한 둘 모두 비슷한 실험과 수술을 필요로 한다.
동물에서의 BCI 연구
원숭이나 쥐 등 동물의 대뇌피질로부터 신호를 기록해 움직임을 디코딩하기 위한 노력이 이루어지고 있다. 원숭이를 대상으로 한 실험에서는 화면에 있는 커서를 움직여 로봇 팔로 간단한 작업을 하는 수준에 이르렀다. 2008년 5월에는 여러 유명 과학 저널과 잡지에 피츠버그대 의료센터의 원숭이가 생각을 통해 로봇팔을 작동시키고 있는 사진이 올라왔다.
초기 연구
1969년에 이루어진 워싱턴 생리학 및 생물물리학과와 지방 기초연구센터Regional Primate Research Center의 페츠Fetz와 그의 동료들의 조작적 조건화에 대한 연구에서는, 원숭이가 지속적인 신경 비활성화 자극에 대해 신경 활성을 증가시킬 수 있음을 밝혔다. 1970년대에는 적절한 신경 활성 패턴을 지속적으로 보상해준 원숭이가 굉장히 빠르게 학습하여 운동피질에 있는 수 개의 뉴런을 자발적으로 조종하게 되었다는 연구가 이루어졌다.
운동피질 뉴런의 활성패턴을 운동으로 복원하는 연구는 1980년대에 시작되었다. 1980년대 존스 홉킨스 대학의 아포스톨로스 게오르고폴로스Apostolos Georgopouleos는 붉은털원숭이의 운동피질에서 한 뉴런의 전기신호와, 그 원숭이가 팔을 움직이는 방향에 수학적 상관관계가 있음을 밝혀냈다. 그는 또한 원숭이의 뇌의 여러군데 퍼져있는 신경 그룹들이 운동을 조절하는데 종합적으로 작용함을 밝혔는데, 기술적인 문제로 인해 동시에 여러군데에서의 신호를 기록할 수는 없었다.
1990년대 중반에는 BCI 분야에서 급속한 발전이 이루어진다. 현재에도 운동피질의 신경 앙상블로부터 복잡한 신호를 기록하여 외부 장비들을 조종하는 연구는 계속되고 있다.
대표적인 연구 결과
케네디와 양 댄
필립 케네디Phillip Kennedy와 그의 동료들은 최초로 신경영양전극을 사용해 BCI를 구현했다. 필립 케네디는 이후 1987년에 Neural Signal을 설립하였다.
1999년에는 버클리대학의 양 댄Yang Dan이 고양이의 시상에 전극배열을 삽입해 기록한 신경 신호를 해독하여 고양이가 보고있는 이미지를 생성하는데 성공했다. 연구는 8개의 짧은 영상을 고양이에게 보여준 뒤 망막의 신호를 처리하는 기관인 외측슬상핵의 뉴런 177개로부터 신호를 기록하여, 수학적으로 이를 복원함으로써 영상을 성공적으로 해독하였다. 후에 일본에서는 fMRI를 통해 사람에서 비슷한 결과를 얻었다.
니코렐리스

듀크대학의 교수 미겔 니코렐리스는 여러개의 전극으로 넓은 부위에서 동시에 신경신호를 기록하는 방식의 BCI을 시도했는데, 1990년대에 쥐에서 시작하여 후에는 올빼미원숭이의 뇌 신호를 해독하여 로봇 팔을 움직이도록 하는 데에 성공했다. 원숭이는 뻗치기나 잡기 등 손의 여러 움직임을 아주 잘 사용하기 때문에 이와 같은 연구에 자주 사용된다.
2000년에는 인터넷 프로토콜을 통해 실시간으로 로봇팔을 조종하는 연구가 이루어졌는데, 로봇팔의 움직임을 원숭이에게 보여주지 않음으로써 어떠한 피드백도 제공하지 않았다. 이처럼 피드백을 제공하지 않는 방식의 BCI를 개방루프 BCIopen-loop BCI라고 한다.
이후 니코렐리스는 올빼미원숭이에 비해 인간과 더욱 유사한 대뇌피질을 갖고 있는 붉은털원숭이에서 폐쇄루프 BCIclosed-loop BCI를 통해 팔을 뻗는것과 물체를 잡는 행동을 로봇팔로 구현하는데 성공했다. 이 원숭이들에게는 로봇팔의 움직임을 보여주지 않으며 훈련시킨 뒤, 로봇 팔의 움직임을 보여줌으로써 시각 피드백을 통해 다시 폐쇄루프 BCI를 훈련시켰다. 이 실험에서는 BCI에 팔을 뻗는 속도와 손을 쥐는 힘을 매개변수로 사용했다. 2011년에는 오도허티O'Doherty와 그의 동료들이 붉은털원숭이에게 대뇌피질자극을 통해 팔 부위의 촉각 피드백을 제공함으로써 BCI를 구현하는데에 성공했다.
도노휴, 슈바르츠, 앤더슨
BCI 기술과 신경 해독 알고리즘 연구에 기여해온 다른 연구자들로는 브라운대학의 존 도노휴John Donoghue, 피츠버그대학의 앤드류 슈바르츠Andrew Schwartz, 그리고 칼텍의 리차드 앤더슨Richard Andersen이 있다. 니코렐리스는 50에서 200개의 뉴런을 가지고 연구를 했는데, 이 연구자들은 15개에서 30개의 뉴런으로 BCI를 구현하는 등 더욱 발전된 연구를 해왔다.
니코렐리스 교수는 붉은털원숭이가 조이스틱을 통해 실제 움직임을 어느 정도 허용하였는데, 도노휴의 연구팀은 조이스틱 없이도 컴퓨터 스크린의 대상을 추적할 수 있도록 훈련시키는데 성공했다. 슈바르츠의 팀은 BCI를 통해 가상현실에서의 3차원 물체 추적을 구현했고, 원숭이들이 이를 통해 로봇팔로 과일이나 마시멜로를 입으로 가져오는 정교한 동작을 구현했음을 밝혔다.
앤더슨의 팀은 후두정엽피질에서 나오는 움직임 이전 신호와, 동물들이 행동에 대한 보상을 예측할 때 나타나는 신호를 가지고 BCI를 구현하였다.
다른 연구들
팔 운동의 위치관계와 작용하는 힘을 예측한 연구들에 이어 근전도를 예측하는 BCI연구 역시 이루어졌다. 이러한 BCI는 사지마비 환자가 움직이기 위해선 어떤 근육에 어떻게 전기자극을 주어야 하는지 알려준다. 미겔 니코렐리스와 그의 동료들은 커다란 신경그룹들의 활동을 가지고 팔의 위치를 예측할 수 있음을 보여주었는데, 팔의 위치를 예측한다는 것은 곧 팔의 운동을 기구에 그대로 적용시킬 수 있다는 것을 의미한다. 카르메나Carmena와 그의 동료들은 원숭이들이 로봇팔을 뻗고 물체를 잡을 수 있도록 신경신호를 프로그래밍 하여 BCI에 적용시키는데 성공했다. 또한 레베데프Lebedev와 그의 동료들은 기존에 있던 사지에 더해 인공적으로 달아준 로봇팔에 대응하는 새로운 두뇌 회로가 재조직된다는 것을 논증하였다.
2019년에는 UCSF의 연구진들이 신경장애로 인해 대화를 잘 하지 못하는 사람들을 위한 BCI를 구현했다. 이 연구에서는 고도로 집적된 ECoG를 통해 환자의 뇌 신호를 기록한 뒤, 딥러닝을 통해 대화를 복원하였다.
현재 BCI 기술에 있어 가장 큰 장애물은 두뇌에서의 감각정보sensor modality에 대해 정밀하고 안전하게 접근할 수 있는 방법이 부족하다는 것이다. 만일 이러한 기술이 등장한다면 뇌와 상호작용할 수 있는 방법이 크게 증진될 것이다.
BCI는 매우 많은 시간을 투자해야하는 아주 복잡한 문제다. 따라서 거윈 샬크Gerwin Schalk는 장기 프로젝트로 2000년부터 뉴욕주 보건부의 R&D 프로그램으로 BCI2000이라고 불리는 일반적인 BCI 시스템을 개발해오고 있다.
최근에는 유전자를 조작한 신경세포에서 채널로돕신과 같은 빛-개폐 이온채널을 사용해 생체내(in vivo)에 있는 신경을 자극하는 방식으로 BCI에 접근하고 있다. 감각피질의 신경세포를 형질주입하여 유전자를 조작한 뒤 빛을 비추어 쥐의 운동결정단계에 영향을 주는 방식의 간단한 학습 연구가 이루어지고 있다.
연구의 부산물로 신경회로와 중추신경계에 대한 이해 역시 깊어진다. 연구자들은 여러개의 신경을 모니터링하는 것이 가장 효율적일 것이라는 신경과학자들의 이론에도 불구하고, 단일 뉴런을 모니터링하는 것만으로도 원숭이가 외부의 운동기관을 잘 조종할 수 있다는 것을 보였다. 그러나 단일 뉴런은 소량의 정보만 보여주기 때문에, 가장 정밀한 수준의 BCI를 위해서는 종합적인 신경의 양상을 측정해야한다는 사실은 변함이 없다. 이외에도 다음의 사실들이 밝혀졌다.
- 한 신경이 여러개의 정보를 처리한다는 것neuronal multitasking principle
- 안정적인 운동을 위해서는 한 군집 내에서 특정 개수 이상의 신경세포가 필요하다는 것neuronal mass principle
- 여러 개의 신경군집들이 동일한 행동을 만들 수 있다는 것neural degeneracy principle
- 새로운 행동을 위해서 기존의 신경군집의 기능이 대체될 수 있다는 것plasticity principle
장애가 없는 사람들에게도 BCI를 적용시키려는 움직임이 있다. 토르스텐 오 잔더Thorsten O. Zander와 크리스티안 코트Christian Kothe는 사용자 중심의 BCI 접근방식을 사용하며 수동적 BCIpassive-라는 용어를 도입한다. 행동과 반응을 통해 직접조종하는 방식이었던 기존의 BCI랑 비교했을 때, 수동적 BCI는 인간-컴퓨터 상호작용HCI 중에 사용자의 상태 변화에 접근하여 이를 해석하는 방식으로 이루어진다. 그리고 이차적으로는 암시적 제어루프implicit control loop를 통해 컴퓨터 시스템이 사용자에게 적응함으로써 편의를 향상시킨다.
신경신호를 해독해 외부의 장치를 구동시키는 방식을 넘어, 말초신경계의 신호를 해독하는 방식으로 적용될 수도 있다. 이처럼 체성감각을 해독하여 더욱 향상된 폐쇄루프 BCI를 구현할 수 있다.
BCI 수상
BCI분야에서 독보적이고 혁신적인 연구를 한 팀들에게 BCI 연구 대상(Annual BCI Research Award)이 주어진다. 매년 접수된 과제들을 명성있는 연구실에 평가해 줄 수 있는지 문의하고, 이렇게 12명의 심사위원들을 정한다. 이들은 1, 2, 3위의 연구를 정해 각각 3천불, 2천불, 1천불의 상금을 수여하게 된다. 역대 1위 연구들의 목록은 다음과 같다.
- 2010: Cuntai Guan, Kai Keng Ang, Karen Sui Geok Chua and Beng Ti Ang, (A*STAR, 싱가포르)
- Motor imagery-based Brain-Computer Interface robotic rehabilitation for stroke
- What are the neuro-physiological causes of performance variations in brain-computer interfacing?
- 2012: Surjo R. Soekadar and Niels Birbaumer, (Applied Neurotechnology Lab, University Hospital Tübingen and Institute of Medical Psychology and Behavioral Neurobiology, Eberhard Karls 튀빙겐 대학, 독일)
- Improving Efficacy of Ipsilesional Brain-Computer Interface Training in Neurorehabilitation of Chronic Stroke
- 2013: M. C. Dadarlata,b, J. E. O’Dohertya, P. N. Sabesa,b (aDepartment of Physiology, Center for Integrative Neuroscience, San Francisco, CA, US, bUC Berkeley-UCSF Bioengineering Graduate Program, UCSF, 캘리포니아, 미국)
- A learning-based approach to artificial sensory feedback: intracortical microstimulation replaces and augments vision
- 2014: Katsuhiko Hamada, Hiromu Mori, Hiroyuki Shinoda, Tomasz M. Rutkowski, (The University of Tokyo, JP, Life Science Center of TARA, University of Tsukuba, JP, RIKEN Brain Science Institute, 일본)
- Airborne Ultrasonic Tactile Display BCI
- 2015: Guy Hotson, David P McMullen, Matthew S. Fifer, Matthew S. Johannes, Kapil D. Katyal, Matthew P. Para, Robert Armiger, William S. Anderson, Nitish V. Thakor, Brock A. Wester, Nathan E. Crone (존스홉킨스 대학, 미국)
- Individual Finger Control of the Modular Prosthetic Limb using High-Density Electrocorticography in a Human Subject
- 2016: Gaurav Sharma, Nick Annetta, Dave Friedenberg, Marcie Bockbrader, Ammar Shaikhouni, W. Mysiw, Chad Bouton, Ali Rezai (Battelle Memorial Institute, 오하이오 주립대, 미국)
- An Implanted BCI for Real-Time Cortical Control of Functional Wrist and Finger Movements in a Human with Quadriplegia
- 2017: S. Aliakbaryhosseinabadi, E. N. Kamavuako, N. Jiang, D. Farina, N. Mrachacz-Kersting (Center for Sensory-Motor Interaction, Department of Health Science and Technology, Aalborg University, Aalborg, Denmark; Department of Systems Design Engineering, Faculty of Engineering, University of Waterloo, Waterloo, Canada; and 임페리얼 칼리지, 런던, 영국)
- Online adaptive brain-computer interface with attention variations
- 2018: Abidemi Bolu Ajiboye, Francis R. Willett, Daniel R. Young, William D. Memberg, Brian A. Murphy, Jonathan P. Miller, Benjamin L. Walter, Jennifer A. Sweet, Harry A. Hoyen, Michael W. Keith, Paul Hunter Peckham, John D. Simeral, John P. Donoghue, Leigh R. Hochberg, Robert F. Kirsch
- Restoring Functional Reach-to-Grasp in a Person with Chronic Tetraplegia using Implanted Functional Electrical Stimulation and Intracortical Brain-Computer Interfaces
- 2019: Sergey D. Stavisky, Francis R. Willett, Paymon Rezaii, Leigh R. Hochberg, Krishna V. Shenoy, Jaimie M. Henderson
- Decoding speech from intracortical multielectrode arrays in dorsal motor cortex
사람에서의 BCI 연구
침습적 BCI
침습적 BCI에서는 신호를 받기 위해 두개골 밑에 전극을 삽입한다. 더 정확하게 신호를 받아들일 수 있다는 이점이 있지만, 수술로 인한 부작용들이 존재한다는 단점도 존재한다. 수술로 인해 대뇌에 생긴 흉터는 신호를 약하게 만들 수 있다. 또한 압둘카터Abdurkader의 2015년 연구에 의하면, 신체가 전극을 받아들이지 못해 의료적인 문제를 야기할 수 있다고도 한다.
시각
침습적 BCI 연구는 시각을 잃은 사람이나 마비 환자에게 새로운 기능을 제공하는데에 초점을 두어왔다. 회백질에 직접 전극이 들어가있기 때문에 굉장히 질 좋은 신호를 받아들일 수 있지만, 흉터조직이 들어섬으로써 신호가 줄어들거나 심지어 아예 사라지는 경향이 관찰되기도 한다. 시각 과학vision science 분야에서는 후천적 시각장애인들을 위해 직접 두뇌 삽입물을 사용해오고 있다. 최초의 연구자들 중 한명이자 개인연구자인 윌리엄 도벨William Dobelle은 BCI를 통해 시각을 회복시키는데에 성공했다.
도벨의 첫번째 실험 대상은 1978년에 후천적 시각장애인이 된 제리였다. 68개의 전극들로 이루어진 배열을 제리의 시각피질에 삽입하고, 안경에 카메라를 달아 전극에 신호를 전달하여 안내섬광을 느끼게 하는데 성공했는데, 처음에는 굉장히 낮은 프레임의 어두운 그림자로만 사물을 인식할 수 있었다. 이를 위해 당시에는 메인프레임 컴퓨터와의 연결이 필요했었지만, 전자기술의 발달로 인해 이제는 휴대가능한 정도의 기구로도 다른 사람의 도움 없이 간단한 작업을 수행할 수 있게 되었다.
2002년에는 도벨에게 지원한 16명의 환자들중 젠스 나우만이라는 후천적 시각장애인이 처음으로 2세대 삽입술의 피험자가 되었다. 이 2세대 장치에서는 안내섬광을 가지고 시각을 구현하는 능력이 더욱 향상되었다. 안내섬광은 시야를 가로질러 연구자들이 "별이 빛나는 밤"이라고 부르는 곳으로 퍼져간다. 이 삽입물을 삽입한 직후 젠스는 자동차로 주차장을 천천히 돌 정도로 시각이 회복되었다. 그러나 불행하게도, 도벨은 2004년에 사망하여 그의 이전 연구들을 문서화하지 못했다. 연이어 실험에 참여한 환자들은 시각을 다시 잃어갔다. 나우만은 도벨과의 경험을 《낙원을 찾아서: 인공 시각 피험자의 증언Search for Paradise: A Patient's Account of the Artificial Vision Experiment》라는 제목으로 출판한 뒤, 현재는 캐나다의 온타리오 남동부에 있는 그의 농장에 돌아가 정상적인 생활을 하고 있다.
운동기능
원숭이가 로봇팔을 조종한 것처럼 마비 환자들의 운동을 회복시켜주기 위한 BCI 연구도 이루어져왔다.
애틀랜타의 에모리 대학교에 있는 필립 케네디와 로이 배케이Roy Bakay의 연구팀은 인간의 뇌에 전극을 꽂아 행동을 높은 수준으로 복제하는데 성공했다. 피험자인 조니 레이(Johnny Ray; 1944-2002)는 1997년에 뇌간에 뇌졸중이 온 후로 락트인 증후군으로 고통받아왔다. 연구팀은 레이의 두뇌에 1998년에 전극을 삽입했고, 오랜 기간의 훈련 끝에 컴퓨터 커서를 움직이는데까지 성공했다. 레이는 2002년에 뇌동맥류로 사망하였다.
사지마비 환자인 매트 네이글Matt Nagle은 2005년에 사이버키네틱스의 BrainGate의 임상을 수행했다. 팔운동을 담당하는 중심전이랑에 96개의 전극이 삽입되었는데, 네이글은 이를 통해 생각만으로 로봇팔, 컴퓨터 커서, 전등과 TV를 조종할 수 있게 되었다. 1년 후 조나단 월포Jonathan Wolpaw 교수는 뇌가 아닌 두개골에 부착된 전극으로 BCI를 구현함으로써 Altran 재단으로부터 상을 수여받았다.
최근에는 브라운 대학교의 Braingate 연구팀과 피츠버그 의료센터의 연구팀이 미국 보훈부와 협력하여, 사지마비환자의 운동피질의 신경배열을 통해 자유도가 높은 로봇팔을 조종하는데 성공했다.
부분침습적 BCI
두개골과 뇌 사이에 장치를 삽입하는 경우 부분침습적 BCI라 한다. 두개골이 신호를 왜곡하고 약하게 만드는 비침습적 BCI보다는 좋은 해상도를 가지고 있고, 뇌에 흉터조직을 만들 염려가 없기 때문에 침습적 BCI보다는 위험부담이 더 적다. 현재 뇌졸중 병변 발생부위의 주변부를 대상으로 임상적으로 시행된다.
두뇌 실질이 아닌 경막 하부나 경막 외부에서 뇌파를 측정하는 방식을 ECoG(Electrocorticography, 피질파)라고 한다. 피질파는 2004년에 워싱턴 대학교 세인트루이스의 에릭 로이트하르트Eric Leuthardt와 다니엘 모란Daniel Moran에 의해 사람을 대상으로 처음 측정되었고, 이후 스페이스 인베이더를 하는 것이 가능할 정도로 기술이 발달되었다. 훈련에 필요한 시간이 기존의 연구들보다 월등히 적었으며, 또 즉각적인 제어 역시 가능했다는 점에서 ECoG가 신호의 유용성과 침습정도를 절충한 좋은 대안이 될 수 있다고 논문에서 명시했다.
피험자가 굉장히 한정되어 있기 때문에 이에 대한 연구는 아직 충분히 많이 이루어지지 않았다. 현재로서는 침습적인 치료를 요하는 심각한 뇌전증 발작 환자들을 대상으로만 이와 같은 연구를 할 수밖에 없다.
피질파는 뇌파에 비해선 좋은 해상도와 신호-노이즈 비, 넓은 진동수 대역을 가지고 있고, 동시에 침습적 측정기술에 비해선 기술적인 어려움, 의료적 문제, 장기적 관찰 가능성이 있다는 점에서 좋은 절충안이 된다. 이러한 이점과 적은 훈련을 필요로 한다는 점에서 운동장애를 가진 사람들에게 실제 적용될 가능성이 가장 높다고 여겨진다. 빛을 이용한 BCI장치는 아직 이론의 범주에서 벗어나지 못했다.
비침습적 BCI
비침습적 신경영상법으로 BCI를 구현하려는 연구도 이루어진다. 현재 BCI 논문의 상당수는 뇌전도(EEG)에 기반한 것들이다. 비침습적인 EEG는 수술이 불필요하며 착용이 굉장히 간편함에도 불구하고, 침습적 BCI보다 공간 해상도가 낮으며 두개골이 고주파를 흡수하기 때문에 신호가 퍼지고 뭉개진다는 단점이 있다. 또한 다른 방법들에 비해 EEG 기반 BCI는 적용하기 전에 충분한 훈련을 거쳐야 한다는 단점도 있다. 결국 어느 종류의 BCI를 사용할지에는 고려할 사항이 매우 많은데, 사용자의 현 상황에 따라 가장 적합한 BCI가 달라진다
뇌전도에 기반하지 않은 BCI기술
안전도(EOG)
안전도를 통한 사물의 조종은 BCI라는 용어를 처음으로 사용한 바이달의 1973년 논문에서 처음 발견할 수 있다. 실 적용은 1989년에 안전도를 사용해 전진, 후진, 좌회전, 우회전, 정지의 다섯 종류의 명령을 구현해 로봇을 조종하면서 처음 이루어졌다.
동공 진동
2016년에 발표된 가상 키보드를 통한 문자 입력에 대한 논문에서는, 각 문자의 배경색의 밝기 진동수를 다르게 해서 문자를 직접 바라보지 않고서도 문자를 입력할 수 있게 하였다.
기능성 근적외선 분광기법(fNIRS)
2014년과 2017년에는 근위축성 측색 경화증(ALS)으로 인해 락트인 증후군에 에 걸린 환자에게 fNIRS를 사용해 다른 사람들과 기본적인 의사소통을 가능케 한 연구가 보고되었다.
뇌전도 기반 BCI
개괄
뇌전도(EEG)는 좋은 시간분해능, 사용의 간편성, 그리고 휴대용과 저렴하다는 장점때문에 비침습적 BCI 연구에서 가장 큰 부분을 차지한다.
초기에는 사용자의 훈련이 많이 필요하다는 점이 뇌전도의 한계로 여겨졌다. 일례로, 1990년대 중반에 독일 튀빙겐 대학교의 닐스 비르바우머Niels Birbaumer는 마비환자들로 하여금 느린피질전위Slow Cortical Potential; SCP를 조절하게하고, 이 뇌파를 이진신호로 사용하여 컴퓨터 커서를 움직이도록 하는 실험을 했다. 이 실험에서 10명의 환자들이 뇌파를 조절함으로써 컴퓨터 커서를 움직이는데 성공했고, 한달 이상의 훈련을 거친 결과 한시간에 100글자 이상을 입력할 수 있게 되었다. 그러나 훈련량이나 정확도, 범용성 면에서 다른 더 좋은 접근방법들이 존재하기 때문에 SCP를 통한 BCI는 수년간 연구되지 않는 현실이다.
신경진동을 이용한 BCI도 있다. 게르트 푸르트셸러Gert Pfurtscheller는 1991년에 BCI 연구실을 열고 운동상상을 통한 BCI를 구현한 적이 있다. 비르바우머도 후에 뉴욕 주립 대학교의 조나단 월포와 함께 어떤 뇌파가 BCI에 가장 적합한지 연구했는데, 이 연구에서는 뮤파와 베타파의 신경진동을 사용했다.
P300을 피드백으로 사용할 수도 있다. P300은 사람이 무언가를 볼 때에 이에 대한 피드백으로 비자발적으로 나타나는데, 위에 소개했던 바이오피드백 방법들이 훈련을 통해 뇌파를 제어하는 방법을 익혀야 한다는 것과는 대조적이다.
2005년에는 CNV flip-flop이라는 새로운 BCI 디지털 제어 회로가 제안되어, 2009년에는 이를 통해 실제로 로봇팔을 움직이게 되었고 2011년에는 하노이탑을 움직이는 실험도 이루어졌다. 2015년에는 EEG로 슈미트 트리거, 플립플롭, 디멀티플렉서, 모뎀을 구현하는 방법이 제안되었다.
미네소타 대학교의 빈 허Bin He 교수 연구팀은 EEG로 침습적 BCI와 비슷한 성능을 낼 수 있음을 보였다. BOLD fMRI와 EEG source imaging 등 최신식 기능성 신경영상법을 통해, 빈 허 연구팀은 운동을 상상할 때의 전기생리학적 신호와 혈류역학적 신호간에 공동변수가 존재하고, 그 영역에서도 공통점이 있다는 사실을 발견했다. 신경영상과 훈련 방식을 다듬은 결과, 빈 허와 동료들은 비침습적 EEG 기반 BCI를 통해 운동을 상상하는 것만으로도 3차원에서의 가상 헬기를 조종하는데 성공했고, 2013년 6월에는 장애물이 많은 코스에서도 헬기를 조종할 정도로 기술을 향상시켰다. 이후 빈 허는 EEG 역문제를 풀어서 만들어진 가상의 뇌파를 가지고 BCI를 구현하는데에도 성공했다. 이와 같은 연구는 신호의 원천을 분석하여 BCI를 하는 것에 대한 이점을 보여주고 있다.
2014년에는 운동능력이 심각하게 손상된 환자가 어떤 신경기반 소통채널보다도 EEG BCI를 통해 더 빠르고 정확하게 소통할 수 있다는 것이 밝혀졌다.
무수성 활성전극 배열
1990년대 초에 캘리포니아 대학교 데이비스의 바박 타헤리Babak Taheri는 미세가공기술을 이용하여 단일/다채널 무수성(젤을 사용하지 않는것) 전극배열을 시연하는데 처음으로 성공했다. 1994년에는 이를 실제로 적용했을 때 은/염화은 전극에 비해 준수한 성능을 보였다. 센서를 네 부분으로 나누어 임피던스 매칭을 통해 노이즈를 줄이기 위한 전자기구를 각 부분에 집적시켰다. 이러한 전극은 (1) 전해물이 남지 않고, (2) 피부에 별도의 준비를 할 필요가 없으며, (3) 센서의 사이즈를 크게 줄일 수 있고, (4) EEG 모니터링 시스템과 매우 잘 호환된다는 장점을 가진다. 활성전극active -은 배터리가 포함된 집적회로와 축전기들의 배열을 집적시켜둔 것이다. 전극을 통해 근본적인 신호를 얻기 위해서는 이와 같은 수준의 집적이 요구된다.
인간의 뇌에서 측정한 4종류의 EEG 신호, (1) 자발적 EEG, (2) 감각 사건관련전위(ERP), (3) 뇌간 전위, (4) 인지적 ERP와 전기 테스트 벤치를 통해 실험한 결과, 무수성 전극은 피부에 별도의 준비가 필요하지 않고, 젤을 요구하지 않으며, 높은 신호-노이즈 비를 가지고 있다는 점에서 높이 평가받는다.
1999년에는 클리블랜드의 케이스 웨스턴 리저브 대학교에서 헌터 페컴(Hunter Peckham)이 이끄는 팀이, 64개의 전극으로 머리에 씌우는 EEG 기구를 만들어 사지마비환자 짐 자티치(Jim Jatich)에게 적용하였다. 자티치가 위/아래와 같이 단순하지만 상반된 개념에 집중하는 동안 생성되는 뇌파에서 베타파를 분리하여 패턴을 관측하였다. 간단한 패턴을 통해 기준점 이상인 경우 스위치를 키고, 아래인 경우 끄도록 실험을 디자인했다. 자티치는 컴퓨터의 커서를 움직였을 뿐만 아니라, 손에 삽입된 신경 조절기구에 신호를 보내어 운동을 일부 회복시킬수도 있었다.
SSVEP 모바일 EEG BCI
2009년 국립 자오퉁 대학 연구팀은 BCI 머리띠를 개발했는데, 실리콘 기반의 MEMS 무수성 전극이 털을 제거한 부위에서 뇌파를 측정하는 방식으로 작동한다. 신호처리 모듈에서 알파파를 특정하면 사용자의 인지능력과 민첩성에 해당하는 정보가 블루투스를 통해 핸드폰으로 전송되었다. 만일 사용자가 졸음을 느끼면 휴대폰은 각성 신호를 주어 환자를 깨우는 식으로 작동하였다.
2011년에는 미 육군 산하의 아브락시스 생명과학의 지원 하에 이루어진 연구에서, EEG를 통해 핸드폰을 울리게 하는 방식의 휴대폰 기반 BCI가 보고되었다. 이 웨어러블 시스템은 생체신호를 받아 증폭하는 4채널 모듈, 무선전달 모듈, 블루투스 휴대폰으로 구성되었다. 전극은 SSVEP(정류상태 시각유발전위)를 포착하였는데, SSVEP란 6Hz 정도로 깜빡거리는 시각자극에 대해 시각피질이 위치한 두정엽과 후두엽 부위에서 측정할 수 있는 전기신호를 말한다. 시험 결과 모든 피험자들이 연습을 거의 하지 않고도 전화를 거는데 성공했다.
단일채널 고속 푸리에 변환과 다채널 시스템 정준상관분석(CCA) 알고리즘에 대한 연구가 이루어짐에 따라 모바일 BCI의 범용성이 넓어졌다는 평가를 받는다. CCA 알고리즘은 여러 BCI 연구에서 높은 정확성과 빠르기를 꾸준히 보여주고 있다. SSVEP를 통해 전화를 거는 연구에 대해 연구자들은 감각 및 운동과 관련된 뮤파/베타파를 집어내면 운동 상상을 통한 BCI에도 똑같이 적용할 수 있을 것이라고 주장했다.
2013년에는 EEG SSVEP를 사용하는 BCI에서 안드로이드 폰, 태블릿, 컴퓨터 각각에 대해 의 파워 스펙트럼 밀도를 분석해 비교하는 실험이 이루어졌다. 미 육군 연구소의 과학자들을 포함한 연구팀이 이 실험을 맡았는데, SSVEP기반 BCI를 일상생활에서도 사용할 수 있을 정도로 실용성, 휴대성, 범용성을 높이는 것을 목표로 했다. 연구 결과 모든 기구에서 주파수를 정밀하게 잡아냈지만, 핸드폰은 약간 불안정한 모습을 보였다. SSVEP 진폭 역시 휴대폰보다 노트북과 태블릿에서 더 강한 값이 관측되었다. 주파수와 진폭의 두 양적 요소들이 모바일 자극 BCI를 평가하는 요소가 된다.
한계점
2011년에는 사용의 편의, 일관된 성능, 하드웨어와 소프트웨어의 비용을 줄일 필요가 있다는 지적을 받았다.
또한 현재 EEG의 한계로는 측정기구의 움직임에 신호가 크게 영향받는다는 점이 있다. 위의 연구들에서는 피험자에게 곧게 앉아 머리와 눈을 움직이지 않도록 통제되었다. 그러나 실용성을 위해서는 움직임이 동반된 상황에 대한 테스트가 많이 이루어져야 할 필요가 있다.
이에 따라 2013년에는 런닝머신에서 다양한 속도로 걷는 피험자에서 SSVEP를 측정해 BCI를 구현한 연구가 미 해군연구청과 육군 연구소의 지원을 받아 이루어졌다. 실험 결과 걷는 속도가 빨라질수록 CCA를 통해 SSVEP를 감지하기가 어려워진다는 사실이 밝혀졌다. 독립 성분 분석(ICA)이 노이즈에서 EEG 신호를 분리하는데 유용하다는 사실이 밝혀짐에 따라, CCA로 추출한 EEG 데이터에 ICA를 적용한 연구가 이루어졌다. 그러나 ICA를 적용한 것과 적용하지 않은 결과가 거의 비슷했다. 연구자들은 의도치 않은 움직임에 대해 ICA와 독립적으로 CCA가 충분한 내성을 가지고 있다는 뜻으로 받아들였고, 따라서 현실에 응용하는데 적합하다고 결론지었다.
2020년에는 캘리포니아 대학교의 연구팀이 뇌파를 문장으로 번역하는 시험을 했는데, 오차율은 3% 미만으로 준수하나 3~50개의 문장을 해독하는데 그쳤다.
보철물과 환경제어
마비환자들이 보철물을 뇌로 제어할 수 있도록 비침습적 BCI를 적용하는 방향으로도 연구되고 있다. 그라츠 대학교 게르트 푸르트셸러 연구팀은 척추부상으로 팔을 못쓰는 환자들에게 BCI를 통해 전기자극을 하여 운동을 회복시킬 수 있는 연구를 하였다. 2012년에서 2013년에는 캘리포니아 대학교 어바인의 연구팀이 BCI를 통해 척수 손상으로 걷지 못하는 환자들을 걸을 수 있도록 회복시킬 수 있다는 연구를 보였는데, 하반신 마비 환자에게 BCI를 응용해서 보행보조기구를 통해 어느 정도 걸음을 회복할 수 있다는 사실도 밝혀졌다. 2009년에는 영국의 개인 연구자인 알렉스 블레이니가 Emotiv사의 EPOC 제품을 가지고 5개의 축이 있는 로봇팔을 조종하는데에 성공했다. 그리고 그는 정신으로 조종하는 휠체어나, 마비환자들을 위한 가정 자동화 기구들을 시연하였다.
군사용 BCI는 DARPA의 지원 하에 1970년대부터 이루어지고 있다. 현재는 신경신호를 통한 사용자간 의사소통에 중점을 두고있다.
DIY와 오픈소스 BCI
2001년에 DIY 신경과학자들과 공학자들에 의해 OpenEEG 프로젝트가 발족되었다. 이들에 의해 처음으로 만들어진 장치가 바로 200~400달러로 제작된 6채널 측정기구인 모듈러EEG가 이 때 발명되었다. OpenEEG 프로젝트는 DIY BCI의 출현을 알렸다.
2010년에 뉴욕 대학교의 프론티어 너드Frontier Nerds들의 ITP프로그램은 "장난감 EEG를 해킹하는 방법(How To Hack Toy EEGs)"라는 제목의 튜토리얼을 발행했다. 많은 DIY BCI 팬들의 마음을 휘저은 이 튜토리얼에서는, 아두이노와 마텔사의 마인드플렉스Mindflex를 사용해 저렴한 가격으로 가정용 EEG 측정기구를 만드는 방법을 공개했다. 이 튜토리얼을 통해 DIY BCI가 더욱 활기를 띠게 되었다.
2013년에는, DARPA의 요청에 따른 킥스타터 캠페인을 통해 OpenBCI가 대두되었다. 고성능의 오픈소스 8채널 EEG 측정기구를 만들었는데, 32비트 보드로 알려져있으며 500달러보다 저렴한 가격에 만들 수 있다. 이년 후에 그들은 3D 프린트된 EEG 헤드셋을 만들어 Ultracortex라 명명하였는데, 신경절 보드라고 불리는 4채널의 EEG 측정 보드를 달고 있어 100달러 미만의 가격이다.
MEG와 MRI
뇌자도(MEG)와 fMRI는 모두 비침습적 BCI의 매개체로 응용 가능하다. MRI를 통해 두명의 사람이 탁구를 치는 동안 실시간으로 뇌혈류 반응을 측정해내는데 성공했으며, 72초의 딜레이를 가지고 로봇팔을 제어하는데 성공했다.
2008년에는 일본 교토에 위치한 전기 통신 기초 연구소(ATR)의 계산신경과학 연구팀들이 뇌 영상을 통해 10x10픽셀의 흑백 영상을 복원해내는데 성공했다. 이 논문은 2008년 12월 10일, 뉴런지(紙)의 표지를 장식했다.
2011년에 캘리포니아 대학교 버클리의 연구자들은 MRI 데이터를 통해 매 초마다 피험자가 어떤 영상을 보는지 복원하는데 성공한다. 이 연구는 영상의 패턴에 대응되는 두뇌의 활성에 대한 통계적 모델을 만드는 방식으로 이루어졌다. 총 18만초의 유튜브 영상에서 100개의 1초 영상을 뽑아서 사용했는데, 실제 피험자의 두뇌 영상 패턴과 상당히 일치하는 영상을 골라낼 수 있었다. 이 100개의 영상들은 나중에 합쳐져 피험자가 보는 영상을 유추하는데 사용되었다.
신경영상에서의 BCI 제어전략
운동상상법
운동을 상상하는 것만으로도 운동피질의 뉴런들은 신호를 발생시킨다. BCI는 이 변화를 측정하여 사용자의 의도를 유추할 수 있다. 운동상상법으로 BCI를 사용하기 위해서는 일반적으로 많은 단계의 훈련이 필요한데, 일관적으로 충분한 성능을 내기 위해서는 며칠동안 매일 수시간을 훈련해야 한다. 그러나 아무리 길게 훈련받더라도, 사용자들은 어떻게 자신이 움직임을 통제하는지 알기가 힘들다. 실제로 운동상상을 통해 게임을 할 경우 그 속도가 느릴 수 밖에 없었다.
최근에 운동상상을 감지하는데 특화된 계산을 하는 기계학습이 개발되었다. 싱가포르 과학기술청은 Filter Bank Common Spatial Pattern(FBCSP)라는 알고리즘을 개발하여, BCI Comptetition IV의 2번째 데이터셋에서 운동상상을 검출해내는데 최고의 성능을 보였다.
수동적 BCI에서의 바이오/신경피드백
대상의 정신적 안정을 모니터링하기 위해 EEG 대신 EMG(근전도), GSR(피부전도도), HRV(심박변위도) 등 신체에서 오는 신호들을 사용 바이오피드백으로 사용하기도 한다. 바이오피드백 시스템은 현재 ADHD나 유아기의 수면장애, 이갈이, 만성통증 등을 치료하는데 사용되고 있다. EEG 바이오피드백 시스템은 일반적으로 네 개의 주파수대역(세타파: 4–7 Hz, 알파파: 8–12 Hz, SMR: 12–15 Hz, 베타파: 15–18 Hz)을 감지하고 이를 사용하는데 초점을 두고 있다. 수동적 BCI는 사용자의 상태에 대한 함축적 정보를 통한 돌발상황에서 자동차 브레이크를 밟는 등의 인간-기계 상호작용에 적용될 수 있다. 같은 자극이라도 반복하면서 사용자의 인지상태가 바뀐다는 점이 고려할 사항으로 남아있다. 일례로, 게임 속에 깜짝 놀랄만한 이벤트가 있는 경우, 두 번째 플레이하는 사람은 이를 예상하고 이에 따른 반응 역시도 달라지게 된다.
시각 유발 전위(VEP)
VEP는 대상의 시각자극이 주어진 이후에 뇌에서 측정되는 전위이다. 여러종류의 VEP가 존재한다.
정류상태 시각유발전위(SSVEPs)는 특정 진동수로 망막에 시각자극을 주며 측정할 수 있는 VEP를 의미한다. 자극으로는 단순하게 깜빡이는 이미지를 사용하기도 하고, 체스판 무늬를 번갈아가면서 보여주기도 한다. SSVEP의 장점은 사용된 자극의 주파수가 EEG 스펙트럼 상에서 잘 구분된다는 점이다. SSVEP는 눈을 깜빡일 때에나 일시적인 VEP에서도 검출할 수 있는 만큼 측정할 기회가 많고, 진동수를 측정하기 때문에 측정기구들의 에러로부터도 비교적 자유로우므로, 많은 BCI 시스템에서 효과적으로 동작하고 있다. 뿐만 아니라 SSVEP의 진폭이 다른 뇌파들보다 세다는 점에서 특히 유용하다. 그러나 SSVEP를 BCI를 사용하기 위해 깜빡이는 특정 신호에 더욱 집중해야만 한다. 이는 사용자에게 피로감을 줄 수 있지만, 실제로는 한 시간 이상 사용한 후에야 유의미한 피로가 측정되며, 실제로는 한 시간 이상 사용할 경우가 별로 없다는 점 역시 고려해야 한다.
또 다른 VEP로는 P300 전위가 있다. P300 사건관련전위는 신호가 주어진 대략 300ms 후에 측정되는 피크를 의미하는데, 이 신호는 사용자가 예상하고 있거나 매우 별난 신호여야 한다. 목표한 자극과 그렇지 않은 자극 사이의 차이가 클 수록 P300의 세기가 크다는 사실이 알려져 있다. P300은 고위단계 집중 작업과 관련되어있다고 생각된다. 사용자에게 주어진 훈련시간이 짧은 경우 P300은 매우 효과적인 BCI 작동 방안이 된다. 처음에는 P300을 사용하기 위해 P300 행렬을 만들었었다. 이 시스템 속에서, 사용자는 6x6 글자표에서 글자나 숫자 하나를 고른다. 표의 행과 열은 매 순간 순차적으로 깜박여, 선택된 글자를 보고 있는 사용자의 두뇌에서 P300을 유도해낸다. 그러나 이 과정은 매우 느려서, 1분에 17개의 글자를 입력하는 것이 한계치이다. P300은 연속적인 기능보다는 불연속적인 기능을 제공한다고 보는 편이 맞을 것이다. P300의 이점은, 사용자가 제어 방법을 전혀 몰라도 된다는 점이다.
텔레파시
2010년에 DARPA에서는 "조용한 대화Silent Talk"라는 이름의 프로그램을 위해 4백만달러의 예산을 편성했다. 이 프로그램의 목적은 전장에서 군인끼리 목소리를 사용하지 않고, 신경신호를 통해 상호작용하는 방법을 개발하는 것이다. 이를 위해 세 가지의 중간 목표가 있는데, 첫째로 각 단어에만 대응되는 EEG 패턴을 구분해내는 것이고, 둘째로 각 단어에 대해 사용자들간에 커다란 차이가 없는 EEG 패턴을 발견하는 것이고, 셋째로는 이 EEG 신호를 해석해 한정된 거리 내로 전달할 수 있는 기구를 실전에 투입 가능한 프로토타입으로 만드는 것이다. 육군은 630만달러로 이 텔레파시 프로젝트를 시작했는데, 거윈 샬크는 220만달러를 지원받아 ECoG 신호를 통해 실제로 말하거나 상상한 자/모음들을 구분하는 결과를 냈다. 이로써 자/모음을 구분하는 독창적인 메카니즘을 조명하는 동시에, 대화상상을 통한 뇌 기반의 의사소통의 기초를 제공해 주었다.
2002년에는 켈빈 워윅은 100개의 전극 배열을 가지고 자신의 신경계를 자극하여 인터넷에 연결하는 시도를 했다. 실제로 워윅은 몇 가지 실험에 성공했다. 그는 이후 아내에게도 전극을 삽입함으로써, 신경계끼리 직접 의사소통을 한 첫 번째 사례가 되었다.
말하는 것을 상상subvocalization하여 인조 텔레파시를 구현하는 것에 대한 연구는 캘리포니아대학 어바인 캠퍼스의 마이크 즈무라(Mike D'Zmura)의 지도 하에 이루어지고 있다. 첫 번째 의사소통은 1960년대에 EEG의 알파파를 사용해 모스부호를 만들어내는 것으로 이루어졌었다. 이후 뇌와 두개골 사이에 전극을 삽입한 침습적을 통해 더 좋은 결과를 보였다. 듀크대학의 미겔 니코렐리스와 브라질 신경과학연구소IINN-ELS는 2013년에 두 쥐의 뇌를 연결하여 정보를 공유하는데 성공하여, 첫 번째로 직접 뇌-뇌 인터페이스를 구현하는데에 성공했다.
세포 배양 BCI
연구자들은 개체 외부에서 배양된 신경 네트워크와 상호작용 하기 위한 방법을 개발해왔다. 배양된 신경조직을 가지고 간단한 문제를 해결하거나 로봇팔을 조종하는 등의 응용방안이 제시되었고, 이를 구현하기 위한 연구들이 이루어지고 있다. 반도체 칩 위에서 배양된 각각의 신경세포를 자극하거나 신호를 측정하는 기술에 대한 연구들은 신경전자공학neuroelectronics이나 뉴로칩neurochip이라는 이름으로 불린다.
첫 번째 신경칩은 1997년 칼텍의 제롬 파인Jerome Pine과 미카엘 메이허Michael Maher의 연구팀이 개발한 것으로 인정된다. 이 칼텍 칩은 16개의 뉴런을 위한 공간을 가지고 있었다.
2003년에는 서던캘리포니아 대학교의 시어도어 베르거Theodore Berger가 인공 해마를 목표로 신경칩을 연구하기 시작했다. 이 신경칩은 쥐의 해마에서 시작해서, 더 고등한 뇌의 보철물로 기동하는 것을 목적으로 하였다. 여러 뇌 부위들 중에 해마가 선택된 이유는, 해마가 뚜렷한 구조를 가지고, 연구가 가장 많이 된 부위였기 때문이었다. 해마의 기능은 경험을 암호화하여 뇌의 여러 부분의 장기기억을 저장하는 것이다.
2004년, 플로리다 대학교의 토마스 드마르즈Thomas DeMarse는 쥐의 뇌에서 25,000개의 뉴런을 가져와 F-22 전투기의 비행 시뮬레이션을 실행하였다. 피질의 뉴런들은 샬레에서 배양되면서 살아있는 신경 네트워크를 형성하였다. 세포들은 60개의 전극 격자 위에서 배열되어 비행 시뮬레이션에서 P/Y를 조종하는데 사용되었다. 이 연구는 인간의 뇌가 세포수준에서의 계산작업을 어떻게 시행하고 또 학습하는지 이해하는 것에 목적을 두었다.
윤리적 이슈
BCI와 관련이 있는 윤리적, 법적, 사회적인 이슈는 다음과 같다.
- 정의 등의 개념적 문제
- 의사소통에 문제가 있는 환자들의 사전동의
- 손익 분석
- BCI팀의 책임 공유 (e.g. 어떻게 책임감있는 팀 결정이 만들어질 수 있다고 보증할 것인가?)
- 환자와 그 가정의 삶의 질을 위한 BCI 기술의 결과
- 부작용 (e.g. SMR을 사용한 신경피드백의 훈련이 수면 질에 영향을 준다는 것이 보고되었다.)
- 개인의 책임과 책임으로부터의 제약 (e.g. 신경보철물의 오작동에 책임이 있는 사람)
- 인간성과 성격이 대체될 가능성
- 인간과 기계 사이의 구분이 흐려지는 것
- 의료계에서의 과다적용
- 동물에서 인간을 대상으로 바꿀 때 불거질 수 있는 연구윤리적 문제들
- 생각읽기와 프라이버시
- 세뇌
- 정부에 의한 오용(심문 등)
- 선택적 혜택에 의한 사회의 계급화
- 미디어와의 소통
현재는 대부분의 BCI가 교정치료에 사용되고 있고, 위의 윤리적 이슈들과는 멀리 떨어져있다. 클라우젠Clausen은 2009년에 "BCI는 윤리적 도전과제를 제시하지만, 다른 종류의 치료법들에게도 비슷한 생명윤리적 문제가 있다"고 말했다. 더 나아가서, 그는 BCI로 인해 불거질 문제점들에 대해 생명윤리가 잘 준비되어있다고 말했다. 하젤라거Haselager와 그의 동료들은 BCI의 효능과 가치에 대한 예측들은 윤리적 문제를 매우 잘 분석하고 있고, 또한 과학자들이 미디어에 어떻게 접근해야 할지에 대해서도 가르쳐주고 있다고 밝혔다. 게다가, 감금증후군 환자들의 사전동의를 윤리적으로 얻는데 표준 프로토콜로 사용될 수 있을 것이라고도 밝혔다.
오늘날 BCI와 그 발달과정은 마치 의료분야의 하나로 보인다. 조제학이 장애인들에게 도움을 주기 위해 시작되었던 것으나 이제는 수면욕을 줄이는데 사용되는 만큼, BCI는 치료법중 하나에서 강화도구로 점진적인 변화를 해 나갈 것이다. 연구자들은 이 기술이 사회적으로 받아들여지기 위해서는 윤리에 대한 가이드라인, 적절한 미디어 보도, 그리고 BCI에 대한 교육이 가장 중요할 것임을 잘 알고 있다. 따라서, 최근에는 BCI 커뮤니티 내에서 BCI개발, 발달 및 배포 윤리에 대한 가이드라인을 만들자는 공감대를 형성하고자 하는 노력이 많이 이루어지고 있다.
저가형 BCI
최근에는 다수의 기업들이 저렴한 BCI를 만들기 위해서 EEG기술의 의료등급을 축소하는 추세이다. 이 기술은 장난감이나 게임장치 내에 구현되었는데, 뉴로스카이나 마텔의 마인드플렉스 같은 장난감들은 상업적으로 아주 성공적이다.
- 2006년 소니는 전파를 가지고 대뇌피질을 자극하는 기술에 대한 특허를 냈다.
- 2007년 뉴로스카이는 뉴로보이라는 게임과 함께 사용자가 구매할 수 있는 첫 번째 소비자기반 EEG를 출시했다. 이는 또한 건식 센서dry sensor를 사용한 첫 번째 대형 EEG 장치이다.
- 2008년 OCZ는 근전도에 기반한 비디오게임 장치를 개발하였다.
- 2008년 파이널판타지의 개발자인 스퀘어 에닉스에서는 뉴로스카이와 Judecca라는 게임을 공동제작한다고 발표했다.
- 2009년 마텔은 뉴로스카이와 함께 EEG를 사용하여 공을 장애물 사이로 굴리는 게임인 마인드플렉스를 발매했다. 현재 가장 잘 팔리는 EEG 게임이다.
- 2009년 Uncle Milton Industries는 뉴로스카이와 함께 스타워즈의 포스의 오라를 가상으로 만들어낼 수 있는 포스 훈련장비를 발매했다.
- 2009년 Emotiv는 4개의 정신상태, 13개의 의식상태, 표정, 머리의 움직임을 읽을 수 있는 14채널 EEG장치인 EPOC을 발매했다. EPOC은 dry sensor 기술을 사용한 최초의 상업적 BCI이나, 더 좋은 성능을 위해서 전해질을 묻힐 수 있다.
- 2011년 타임스는 뉴로웨어의 "네코미미"를 올해의 발명품 중 하나로 선정했다. 2012년 뉴로웨어는 뉴로스카이 제품을 통해 조종할 수 있는 고양이귀를 포함한 코스튬을 출판할 계획이라고 밝혔다.
- 2014년 2월, 마비환자를 위한 외골격 장치를 만드는 비영리단체인 'They Shall Walk'는 무선 BCI 개발을 위해 파트너쉽을 맺었다.
- 2016년 취미개발자의 그룹이 신경신호를 스마트폰의 오디오잭으로 번송할 수 있는 오픈소스 BCI 보드를 만들었는데, 20파운드 이하로 가격을 낮추고 있다. 안드로이드에서는 유니티를 활용한 진단 애플리케이션을 다운받을 수 있다.
전망

유럽의 12 파트너로 구성된 컨소지움에서는 Horizon 2020이라는 프로그램에 대한 유럽 위원회의 펀딩 계획을 지원하기 위한 로드맵 작성을 완료했다. 이 프로젝트는 2013년 11월에 시작해 2015년 4월에 종료되며, 컨소지움의 로드맵은 여기서 다운로드 가능하다. 클레멘스 브루너Clemens Brunner 박사의 2015년 논문은 이 프로젝트에 대한 분석과 성과를 설명하고 있는데, 부상하고 있는 BCI 사회에 대한 내용 역시 실려있다. 여기에서는 BCI의 정의와 응용, 최신 연구경향에 대한 탐구, 윤리적 이슈에 대한 토의, 그리고 새로운 BCI를 위한 또다른 접근방향의 평가가 이루어졌다. 이 논문이 말하듯, 컨소지움의 새로운 로드맵은 일반적으로 브렌단 알리슨 박사Brendran Allison의 권고를 확장 및 보조하는 양상인데, 이 박사는 떠오르는 BCI의 방향에 대한 대단한 열정을 전달하고 있다.
다른 최신 논문들은 새로운 장애인 사용자들을 위해 가장 희망적인 미래 BCI의 방향을 탐사하고 있다.
의식장애(DOC)
의식장애는 혼수상태, 식물인간, 최소의식상태(MCS)를 포함한다. 새로운 BCI 연구들은 이러한 장애에 있는 사람들을 도울 방안을 여러 방향으로 찾고 있다. 연구 초기의 목표는 간단한 인지과제를 수행할 수 있는 환자들을 찾는 것이며, 당연하게도 이런 과정을 통해 환자의 분류를 다시 할 수 있다. 이 말인 즉슨, 의식장애로 분류된 사람들이 사실은 정보를 처리해여 생활에 중요한 결정들을 스스로 내릴 수도 있다는 것이다. 의식장애로 진단된 몇몇은 가족들에 의해 연명치료중단 결정이 내려지기도 한다. 이 결정에 환자의 생각을 물어볼 수 있다는 점에서, 의식장애 환자들의 의사를 물어볼 수 있는 방향으로의 연구가 이루어지도록 강한 윤리적 압력을 받게 될 것이라고 생각된다.
많은 논문들이 의식장애 환자를 돕는데에 BCI를 적용하는데 해결해야 할 문제점과 해결방안을 다루고 있다. 문제점중 하나는, 의식장애 환자들이 시각기반 BCI를 사용할 수 없다는 것이다. 따라서 새로운 도구들은 청각이나 진동촉각vibrotactile에 기반한다. 환자들은 헤드폰을 쓰거나 진동촉각장치를 손목, 목, 다리 등에 착용할 수 있다. 또다른 문제점은, 환자들에게 의식이 계속 있지는 않으므로 특정 시각에만 의사소통이 가능하다는 점이다. 이는 잘못된 진단의 결과이다. 일부 환자들은 하루에 몇 시간동안만 의사의 요청에 반응할 수 있고, 이것은 의사가 예측할 수 없는 것이다. 따라서 의사의 진료중에 환자가 반응할 수 없게 된다면 진단이 제대로 되지 않는 것이다. 따라서 실제 현장에서 전문가의 도움없이 보호자가 사용할 수 있는 도구가 필요하다. 이런 도구는 자동화되어 "당신의 아버지가 조지 입니까?" 등의 질문을 환자에게 던질 수 있어야 한다. 이에 대해 환자는 왼쪽이나 오른쪽 손목에 집중하여 네/아니오로 대답할 수 있다. 이렇게 한 쪽에 집중하는 것은 EEG 패턴에 신뢰할 수 있는 정도의 변화를 가져오게 되고, 따라서 환자와 의사소통이 가능해지는 것이다. 이 의사소통의 결과는 물론 의사나 간호사에게 표현되어 진단이 수정될 수 있어야 한다. 덧붙이자면, 이러한 환자들은 BCI 기반 의사소통 도구를 통해 기본적인 요구, 침대의 위치 조절, 공기조화기술을 조절할 수 있어야 하고, 삶에 있어서 중요한 결정들과 소통을 할 수 있도록 해야 한다.
이 연구는 뷔츠버그대의 안드레아 퀴블러Andrea Kuebler 교수의 DECODER 프로젝트 등 서로 다른 EU 펀딩 프로젝트에 의해 부분적으로 지원된다. DECODER 프로젝트는 의식장애인들의 의사소통을 돕는 mindBEAGLE라는 이름의 첫 번째 BCI 시스템을 개발하는데 기여했다. 이 시스템은 의식장애 환자들과 일하는 비전문가들을 도울 수 있도록 디자인되었다. 2015년에는 ComAlert라는 이름의 EU 펀딩 프로젝트에서 더 향상된 의식장애 예측, 의사소통, 회복을 돕는 PARC라는 이름의 기술을 개발했다. 딘 크루시엔스키Dean Krusienski교수와 창 남Chang Nam에 의해 지도되는 미국 국립과학재단 펀딩 프로젝트도 있다. 이 프로젝트는 더 향상된 진동촉각 시스템, 고급 신호분석, 그리고 더 나아진 의사소통 시스템을 개발하였다.
운동기능 회복
뇌졸중이나 부상 등으로 잃어버린 운동기능의 회복을 위해 BCI를 응용할 방안이 연구되어왔다. 피험자들이 운동을 시도하거나 상상할 때의 운동피질의 활성을 측정하여 BCI를 제공하는데, 여기에는 (1) 환자가 지시된 운동을 불이행하는 경우 이를 환자나 치료사에게 알려줄 수 있고 (2) 기능성 자극이나 가상 아바타로 피드백을 제공할 수 있다는 장점이 있다.
지금까지 운동기능 회복을 위한 BCI에서는 환자의 운동상상을 측정하기 위해 EEG만 사용해왔다. 그러나 뇌졸중 재활을 위해 위해 fMRI를 통해 EEG와는 다른 생리적 변화를 BCI에 사용할 수도 있다. 운동기능 회복을 위해 비침습적 뇌 자극을 BCI와 더불어 사용한 경우도 있다. 2016년에 멜버른 대학교는 마비환자가 외부 장치를 사용할 수 있도록 BCI를 활용할 수 있는 방안에 대해 개념 증명 데이터를 발표했다. 현재 임상실험이 계속 진행 중이다.
기능성 뇌 지도
약물이 들지 않는 간질환자나 종양환자 등 대략 40만명의 사람들이 매년 신경수술을 받기 위해 뇌 지도를 그린다. 이 때 전극이 뇌 위에 놓여져 기능적 부위와 구조를 정밀하게 확인한다. 환자들은 이 수술중에 깨어서 손가락을 움직이거나 단어를 반복하는 등 몇몇 작업들을 수행하기도 한다. 이러한 과정을 통해 외과의사가 얼마만큼의 뇌 조직을 제거해야 하는지 정확히 파악할 수 있다. 너무 많은 뇌 조직을 제거한다면 불필요한 기능장애를 야기할 수도 있고, 너무 적게 제거한다면 병을 치료하지 못하고 또다른 수술을 요구할 수 있기 때문이다.
BCI 전문가들과 의사들이 협력하여 신경수술을 위한 새로운 뇌 지도화 방법들을 탐구하고 있다. 이 작업은 비침습적 방법으로는 측정하기 힘든 감마파에 집중하고 있다. 이로써 운동과 언어를 포함한 다양한 기능에 중요한 뇌 부위들을 구분하는데 큰 향상을 가져왔다.
신경 먼지
신경 먼지(Neural dust)는 밀리미터 크기의 무선 전력 전송 신경센서를 의미하며, 2011년에 캘리포니아 대학교 버클리 무선연구센터에서 지속가능한 BCI의 필요성을 제시함과 함께 개발되었다. 이 모델 중 하나인 트랜지스터 모델은 국소장전위Local Field Potential; LFP와 활동전위를 구분할 수 있었는데, 이는 신경을 기록할 때 얻을 수 있는 데이터를 여러 가지 측면에서 매우 풍부하게 할 것으로 예측된다.
플렉서블 장치
플렉서블 전자회로는 고분자나 비단,폴리이미드,파릴렌, 펜타센, PDMS 등 유연한 물질에 찍어낸 회로를 말한다. 유기체에 기반한 물질들의 유연성은 전자기기들을 구부릴 수 있도록 하며, 이러한 장치들을 만들기 위한 제조기술은 집적회로나 MEMS를 만들기 위한 것과 매우 유사하다. 플렉시블 전자기기는 1960년대와 1970년대에 처음으로 개발되었으나, 제대로 주목을 받기 시작한 것은 2000년대 중반이다.
